
Noker Electric, คู่ค้าของคุณเป็นมืออาชีพไฟฟ้า!


รายละเอียดสินค้า:
การชำระเงิน:
|
| การสื่อสาร: | Modbus-RTU | การป้องกัน: | ฟังก์ชั่นการป้องกันที่สมบูรณ์แบบ |
|---|---|---|---|
| ความเชื่อถือได้: | การทดสอบอายุที่อุณหภูมิสูงและต่ำที่เข้มงวด | การควบคุมเวกเตอร์: | การควบคุมเวกเตอร์สำหรับมอเตอร์ต่างๆ |
| การควบคุมเวกเตอร์เซ็นเซอร์ความเร็วที่ไม่ใช่: | การควบคุมเวกเตอร์เซ็นเซอร์ความเร็วไม่ใช่ใหม่ล่าสุด | แรงบิดเริ่มต้น: | แรงบิดเริ่มต้นสูง |
| แสงสูง: | ควบคุมความถี่ตัวแปรไดรฟ์อินเวอร์เตอร์ความถี่,frequency inverter drive |
||
การรับรอง CE กรงกระรอกอินเวอร์เตอร์เวกเตอร์ความถี่แบบอะซิงโครนัส
สามเฟส AC380V 15KW กระรอกกรงมอเตอร์ไฟฟ้าแบบอะซิงโครนัสเซ็นเซอร์ความเร็วไม่ใช่เวกเตอร์ความถี่อินเวอร์เตอร์เป็นเวกเตอร์ความถี่อินเวอร์เตอร์ปัจจุบันทั่วไปที่มีประสิทธิภาพสูงโดยเฉพาะไดรฟ์มอเตอร์เหนี่ยวนำไดรฟ์สำหรับบรรจุภัณฑ์อาหารพัดลมปั๊มและความหลากหลายของ อุปกรณ์การผลิตอัตโนมัติ
คุณสมบัติ
สนับสนุนการควบคุมเวกเตอร์สำหรับมอเตอร์ต่าง ๆ
1. สนับสนุนมอเตอร์แบบอะซิงโครนัสและตัวควบคุมเวกเตอร์สำหรับมอเตอร์แบบซิงโครนัส
2. สนับสนุนการควบคุมเวกเตอร์สำหรับมอเตอร์ซิงโครนัสแม่เหล็กถาวรโดยไม่มีการตอบกลับตำแหน่งที่แน่นอน
3. สนับสนุนการเข้ารหัสต่างๆเข้ารหัสที่แตกต่างกันเปิดตัวเข้ารหัสและเข้ารหัสแบบหมุน
การควบคุมเวกเตอร์เซ็นเซอร์ความเร็วไม่ใช่ใหม่ล่าสุด
1. การควบคุมเวกเตอร์เซ็นเซอร์ที่ไม่ได้ความเร็วสามารถทำการล็อคแบบโรเตอร์และสามารถส่งออกช่วงเวลาของแรง 150% ที่ 0.5Hz
2. การควบคุมเวกเตอร์เซ็นเซอร์ที่ไม่ใช่ความเร็วสามารถลดความไวของพารามิเตอร์มอเตอร์และปรับปรุงการบังคับใช้ในปัจจุบัน
3. มันสามารถใช้สำหรับการควบคุมที่คดเคี้ยวกระจายโหลดภายใต้มอเตอร์ต่างๆลากหนึ่งโหลดและโอกาสอื่น ๆ
ลักษณะของแรงบิดเริ่มต้นสูงและการตอบสนองที่เหนือกว่า
1. แรงบิดเริ่มต้น 150% สามารถให้ที่ 0.5Hz (ไม่มีตัวควบคุมเวกเตอร์สำหรับเซ็นเซอร์) ในขณะที่แรงบิด 180% ที่ความเร็วศูนย์ (พร้อมตัวควบคุมเวกเตอร์สำหรับเซ็นเซอร์) สามารถให้ที่ 0 Hz
2. หากไม่มีการควบคุมเวกเตอร์สำหรับเซ็นเซอร์แรงบิดคือ <20 ms ด้วยการควบคุมเวกเตอร์สำหรับเซ็นเซอร์แรงบิดคือ <5 ms
สเปค
| ชิ้น | ข้อมูลจำเพาะ | ||
| ฟังก์ชั่นมาตรฐาน | ช่วงแรงดันไฟฟ้าอินพุต | แรงดันไฟฟ้าผันผวนอย่างต่อเนื่อง: ± 10% แรงดันไฟฟ้าผันผวนชั่วคราว: -15% ~ + 10% | |
| ความถี่อินพุต | ช่วงความผันผวน 50Hz / 60Hz: ± 5% | ||
| ความถี่สูงสุด | การควบคุมเวกเตอร์: 0 ~ 300Hz การควบคุม V / F: 0 ~ 320Hz | ||
| ความถี่พาหะ | 0.5Khz ~ 16KHz ความถี่พาหะจะถูกปรับโดยอัตโนมัติตามคุณสมบัติการโหลด | ||
| ความละเอียดความถี่อินพุต | การตั้งค่าดิจิตอล: 0.01Hz การตั้งค่าอนาล็อก: ความถี่สูงสุด± 0.025% | ||
| โหมดควบคุม | เซ็นเซอร์เวกเตอร์ fux ไม่มีเซ็นเซอร์ (SVC) การควบคุมเวกเตอร์แบบวงปิด (FVC) การควบคุมแรงดันไฟฟ้า / ความถี่ (V / F) | ||
| แรงบิดเริ่มต้น | ประเภท G: 0.5Hz / 150% (SVC); 0Hz / 180% (FVC) ชนิด P: 0.5Hz / 100% | ||
| ช่วงความเร็ว | 1: 100 (SVC) | 1: 1,000 (FVC) | |
| ความแม่นยำเสถียรภาพความเร็ว | ± 0.5% (SVC) | ± 0.02% (FVC) | |
| ความแม่นยำในการควบคุมแรงบิด | ± 5% (SVC) | ||
W ฟังก์ชั่นมาตรฐาน | ความจุเกินพิกัด | ประเภท G: 60 วินาทีสำหรับ 150% ของการจัดอันดับในปัจจุบัน 3s สำหรับ 180% ของการจัดอันดับในปัจจุบัน ชนิด P: 60s สำหรับ 120% ของการจัดอันดับในปัจจุบัน 3s สำหรับ 150% ของการจัดอันดับในปัจจุบัน | |
| เพิ่มแรงบิด | คงที่เพิ่ม; ปรับเพิ่ม 0.1% ~ 30.0% | ||
| เส้นโค้ง V / F | เส้นโค้ง V / F แบบเส้นตรง เส้นโค้ง V / F หลายจุด; เส้นโค้ง N-power V / F (1.2 กำลัง, 1.4 กำลัง, 1.6 กำลัง, 1.8 กำลัง, จัตุรัส) | ||
| การแยก V / F | สองประเภท: แยกสมบูรณ์ แยกครึ่ง | ||
| แรงบิดสูงสุดและการควบคุม | มันสามารถ จำกัด แรงบิดโดยอัตโนมัติและป้องกันไม่ให้บ่อยกว่าการสะดุดในปัจจุบันในระหว่างกระบวนการทำงาน สามารถใช้การควบคุมแรงบิดในโหมด FVC | ||
| เบรก DC | ความถี่เบรก DC: 0.00Hz ถึงความถี่สูงสุด เวลาในการเบรก: 0.0s ~ 36.0s การดำเนินการเบรกค่าปัจจุบัน: 0.0% ~ 100.0% | ||
| การควบคุม JOG | ช่วงความถี่ JOG: 0.00Hz ~ 50.00Hz เวลาเร่งความเร็ว / การลดความเร็ว JOG: 0.0s ~ 6500.0 วินาที | ||
| PLC อย่างง่าย, ออนบอร์ดความเร็วหลายค่าที่ตั้งไว้ล่วงหน้า | ใช้ความเร็วสูงสุด 16 ระดับผ่านฟังก์ชั่น PLC อย่างง่ายหรือการรวมกันของเทอร์มินัล X | ||
| PID ในตัว | มันตระหนักถึงระบบควบคุมวงปิดที่ควบคุมกระบวนการได้อย่างง่ายดาย | ||
| ควบคุมแรงดันไฟฟ้าอัตโนมัติ (AVR) | มันสามารถรักษาแรงดันขาออกคงที่โดยอัตโนมัติเมื่อแรงดันไฟเมนเปลี่ยนไป | ||
| การควบคุมแรงดันไฟฟ้าเกิน / กระแสเกิน | กระแสและแรงดันไฟฟ้าถูก จำกัด โดยอัตโนมัติในระหว่างกระบวนการทำงานเพื่อหลีกเลี่ยงการสะดุดความถี่เนื่องจากแรงดันไฟฟ้าเกิน / กระแสเกิน | ||
| ฟังก์ชั่นเป็นรายบุคคล | ประสิทธิภาพสูง | การควบคุมมอเตอร์แบบอะซิงโครนัสและมอเตอร์แบบซิงโครนัสถูกนำมาใช้ผ่านเทคโนโลยีการควบคุมเวกเตอร์ในปัจจุบันที่มีประสิทธิภาพสูง | |
| โหมดควบคุมแรงบิด | การควบคุมความเร็วและโหมดการควบคุมแรงบิดสามารถตระหนักถึงการควบคุมความตึงเครียดวงเปิด | ||
| กำลังจิ้ม | พลังงานป้อนกลับโหลดชดเชยการลดแรงดันไฟฟ้าเพื่อให้ไดรฟ์ AC สามารถทำงานต่อไปได้ในเวลาอันสั้น | ||
| ฟังก์ชั่นเป็นรายบุคคล | ขีด จำกัด ปัจจุบันอย่างรวดเร็ว | ช่วยหลีกเลี่ยงข้อผิดพลาดกระแสเกินบ่อยของไดรฟ์ AC |
| IO เสมือน | XDO เสมือนห้ากลุ่มสามารถตระหนักถึงการควบคุมทางตรรกะอย่างง่าย | |
| การควบคุมความยาวคงที่ | ตามจำนวนของพัลส์เพื่อให้ได้การควบคุมความยาวคงที่ | |
| การควบคุมเวลา | ช่วงเวลา: 0.0Min ~ 6500.0 นาที | |
| การสลับหลายมอเตอร์ | สามารถสลับสี่มอเตอร์ผ่านพารามิเตอร์กลุ่มมอเตอร์สี่ชุด | |
| โปรโตคอลการสื่อสารที่หลากหลาย | รองรับการสื่อสารผ่าน Modbus-RTU, PROFIBUS-DP, CANlink และ CANopen | |
| ป้องกันมอเตอร์ร้อนมากเกินไป | การ์ดขยาย I / O ที่เป็นอุปกรณ์เสริมช่วยให้ AI3 สามารถรับอินพุตเซ็นเซอร์อุณหภูมิมอเตอร์เพื่อป้องกันการเกิดความร้อนเกินของมอเตอร์ | |
| เข้ารหัสหลายประเภท | รองรับเอนโค้ดเดอร์ต่าง ๆ เช่นดิฟเฟอเรนเดอร์ดิฟเฟอร์เดอเรเตอร์เอ็นโค้ดเดอร์คอลเล็คเตอร์ตัวแก้ไขยูวีเอนโค้ดเดอร์และตัวเข้ารหัส SIN / COS | |
| วิ่ง | กำลังรันคำสั่ง | แผงควบคุมการทำงาน อาคารควบคุม หม้อสื่อสารแบบอนุกรม คุณสามารถสลับการทำงานระหว่างแหล่งข้อมูลเหล่านี้ได้หลายวิธี |
| แหล่งความถี่ A | มีแหล่งความถี่ทั้งหมด 10 แหล่งเช่นการตั้งค่าดิจิตอลการตั้งค่าแรงดันไฟฟ้าอะนาล็อกการตั้งค่ากระแสอนาล็อกการตั้งค่าพัลส์และการตั้งค่าพอร์ตการสื่อสารแบบอนุกรม คุณสามารถสลับการทำงานระหว่างแหล่งข้อมูลเหล่านี้ได้หลายวิธี | |
| แหล่งความถี่ B | มีแหล่งความถี่สิบแหล่ง มันสามารถใช้การปรับจูนเสริมความถี่และการสังเคราะห์ความถี่ | |
| ช่องรับสัญญาณ | มาตรฐาน: 5 ช่องสัญญาณดิจิตอล (X) ซึ่งหนึ่งในนั้นรองรับสัญญาณพัลส์ความเร็วสูงสูงถึง 100KHz; 2 เทอร์มินัลอินพุต (AI) ซึ่งหนึ่งในนั้นรองรับแรงดันไฟฟ้าอินพุต 0 ~ 10V 4 ~ 20mA อินพุตปัจจุบัน กำลังขยาย: 5 X เทอร์มินัล 1 เทอร์มินัล AI ที่รองรับแรงดันไฟฟ้าอินพุต -10 ~ 10V | |
| ขั้วเอาท์พุท | มาตรฐาน: 1 ขั้วเอาท์พุทพัลส์ความเร็วสูง (open-Collector) ที่รองรับเอาต์พุตสัญญาณคลื่นสี่เหลี่ยม 0 ~ 100KHz; 1 ช่องสัญญาณดิจิตอล (DO); 1 ขั้วเอาท์พุทรีเลย์; เทอร์มินัล 1 เอาท์พุทอะนาล็อก (AO) ที่รองรับกระแสไฟออก 0 ~ 20mA หรือแรงดันเอาต์พุต 0 ~ 10V กำลังขยาย: 1 สถานีปลายทาง; 1 ขั้วเอาท์พุทรีเลย์; 1 ช่องเสียบ AO ที่รองรับเอาต์พุตปัจจุบัน 0 ~ 20mA หรือเอาต์พุตแรงดันไฟฟ้า 0 ~ 10V | |
| แสดงและใช้งานบนแผงการทำงาน | จอแสดงผล LED | มันแสดงพารามิเตอร์ |
| การล็อคกุญแจและการเลือกฟังก์ชั่น | สามารถล็อคกุญแจบางส่วนหรือทั้งหมดและกำหนดช่วงฟังก์ชั่นของปุ่มบางปุ่มเพื่อป้องกันการทำงานผิดพลาด | |
| โหมดการป้องกัน | มอเตอร์ตรวจจับการลัดวงจรที่เปิดเครื่องป้องกันการสูญเสียเฟสอินพุต / เอาท์พุตการป้องกันกระแสเกินการป้องกันแรงดันเกินการป้องกันแรงดันไฟฟ้าต่ำการป้องกันความร้อนเกิน | |
| ชิ้นส่วนอุปกรณ์เสริม | แผงควบคุม LCD, ชุดเบรก, การ์ดส่วนต่อขยาย I / O 1, การ์ดส่วนต่อขยาย I / O 2, การ์ดผู้ใช้ที่ตั้งโปรแกรมได้, การ์ดสื่อสาร RS485, การ์ดสื่อสาร PROFIBUS-DP, การ์ดสื่อสาร CANlink, การ์ดสื่อสาร CANopen, อินพุตการ์ด PG, UVW ใส่การ์ด PG, แปลงการ์ด PG และการ์ดอินพุต PG PG | |
| สิ่งแวดล้อม | ตำแหน่งการติดตั้ง | ในร่ม, ฟรีจากแสงแดดโดยตรง, ฝุ่น, ก๊าซกัดกร่อน, ก๊าซที่ติดไฟได้, ควันน้ำมัน, ไอ, หยดหรือเกลือ |
| ระดับความสูง | ต่ำกว่า 1,000m | |
| อุณหภูมิโดยรอบ | -10 ℃ถึง + 40 ℃ (ไม่จัดอันดับหากอุณหภูมิแวดล้อมอยู่ระหว่าง 40 ℃ถึง 50 ℃) | |
| ความชื้น | น้อยกว่า 95% RH โดยไม่ต้องควบแน่น | |
| การสั่นสะเทือน | น้อยกว่า 5.9m / s2 (0.6g) | |
| อุณหภูมิการเก็บรักษา | -20 ℃ถึง + 60 ℃ | |
| ระดับ IP | IP20 | |
| ระดับมลพิษ | PD2 | |
| ระบบจำหน่ายไฟฟ้า | TN, TT |
สายควบคุมโหมดห่วง
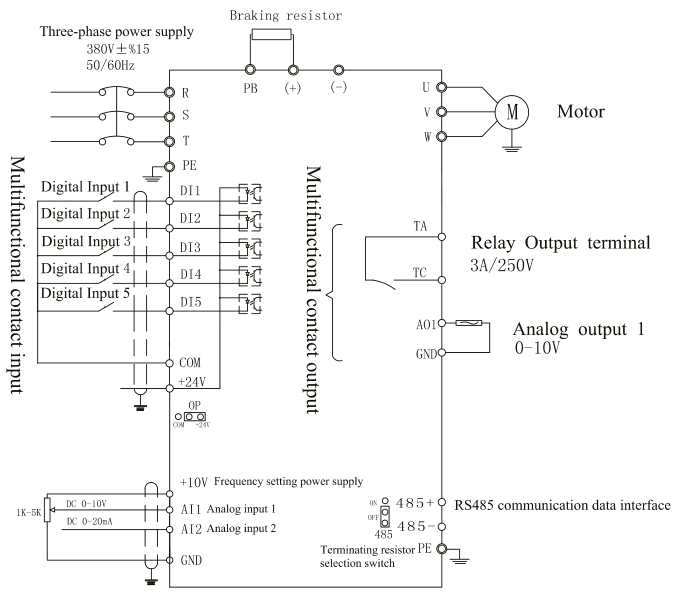
คำอธิบายฟังก์ชั่นของสถานีควบคุม
ประเภท | สัญลักษณ์เทอร์มินัล | ชื่ออาคาร | คำอธิบายฟังก์ชั่น |
|---|---|---|---|
| แหล่งจ่ายไฟ | + 10V-GND | การเชื่อมต่อภายนอกของแหล่งจ่ายไฟ V 10V | ให้แหล่งจ่ายไฟ + 10V ภายนอกด้วยกระแสเอาต์พุตสูงสุด: 10mA โดยทั่วไปจะใช้เป็นแหล่งจ่ายไฟทำงานสำหรับโพเทนชิออมิเตอร์ภายนอกและช่วงความต้านทานของโพเทนชิออมิเตอร์คือ1kΩ ~ 5k Ω |
| + 24V-COM | การเชื่อมต่อภายนอกของแหล่งจ่ายไฟ + 24V | + แหล่งจ่ายไฟ 24V ให้ออกไปด้านนอกและโดยทั่วไปใช้เป็นแหล่งจ่ายไฟทำงานสำหรับขั้วอินพุต / เอาต์พุตดิจิตอลและแหล่งจ่ายไฟสำหรับเซ็นเซอร์ภายนอก กระแสไฟขาออกสูงสุด: 200mA | |
| OP | ขั้วอินพุตของแหล่งจ่ายไฟภายนอก | ค่าเริ่มต้นจากโรงงานคือการเชื่อมต่อกับ + 24V เมื่อสัญญาณภายนอกถูกใช้เพื่อขับ DI1 ~ DI5, OP จะเชื่อมต่อกับแหล่งจ่ายไฟภายนอกและตัดการเชื่อมต่อจากขั้วจ่ายไฟ + 24V | |
| อินพุตแบบอะนาล็อก | AI1-GND | ขั้วอินพุตแบบอะนาล็อก 1 | 1. ช่วงแรงดันไฟฟ้าอินพุต: DC 0V ~ 10V 2. ความต้านทานอินพุต: 22kΩ |
| AI2-GND | ช่องรับสัญญาณอนาล็อก 2 | 1. ช่วงอินพุต: 4mA ~ 20mA 2. ความต้านทานอินพุต: 500Ωสำหรับอินพุตปัจจุบัน | |
| อินพุตดิจิตอล | DI1- OP | ดิจิตอล อินพุต 1 | 1. แยก coupler แสงกับอินพุตสองขั้ว 2. ความต้านทานอินพุต: 2.4kΩ 3. ช่วงแรงดันไฟฟ้าในระดับอินพุต: 9V ~ 30V |
| DI2- OP | ดิจิตอล อินพุต 2 | ||
| DI3- OP | ดิจิตอล อินพุต 3 | ||
| DI4- OP | ดิจิตอล อินพุต 4 | ||
| DI5- OP | ขั้วอินพุตพัลส์ความเร็วสูง | นอกเหนือจากคุณสมบัติของ DI1 ~ DI5 มันอาจถูกใช้เป็นช่องสัญญาณพัลส์ความเร็วสูง ความถี่อินพุทสูงสุด: 50kHz | |
| เอาต์พุตแบบอะนาล็อก | AO1-GND | อนาล็อก เอาท์พุท 1 | Jumper J5 บนแผงควบคุมจะต้องกำหนดแรงดันไฟฟ้าหรือกระแสไฟขาออก ช่วงแรงดันเอาท์พุท: 0V ~ 10V ช่วงปัจจุบันเอาท์พุท: 0mA ~ 20mA |
| รีเลย์ | T / AT / C | เปิดเทอร์มินัล | ติดต่อไดรฟ์ความจุ: 25V ac, 3A, COSØ = 0.4 30Vdc, 1A |
| ส่วนต่อประสานการสื่อสาร | 485 + 485- | Modbus | อินเตอร์เฟสการสื่อสาร Modbus เอาต์พุตไม่แยก |
บำรุงรักษารายวัน
เนื่องจากอิทธิพลของอุณหภูมิความชื้นและฝุ่นละอองในสภาพแวดล้อมและผลกระทบของการสั่นสะเทือนส่วนประกอบภายในของตัวแปลงความถี่จะส่งผลให้อายุซึ่งทำให้เกิดความล้มเหลวในการแปลงความถี่หรือลดอายุการใช้งานสำหรับความถี่ แปลง ดังนั้นจึงจำเป็นต้องดำเนินการบำรุงรักษารายวันและประจำกับตัวแปลงความถี่
รายการตรวจสอบรายวัน:
1) เสียงจะเปลี่ยนแปลงอย่างผิดปกติเมื่อมอเตอร์ทำงานหรือไม่
2) การสั่นสะเทือนเกิดขึ้นเมื่อมอเตอร์ทำงานหรือไม่
3) ไม่ว่าจะเป็นสภาพแวดล้อมการติดตั้งสำหรับการเปลี่ยนแปลงความถี่
4) พัดลมระบายความร้อนของฟังก์ชั่นการแปลงความถี่ตามปกติ
5) เครื่องแปลงความถี่มีความร้อนสูงเกินไปหรือไม่
6) ทำความสะอาดทุกวัน:
7) ให้เครื่องแปลงความถี่อยู่ในสภาพสะอาดเสมอ
8) กำจัดฝุ่นบนผิวหน้าของเครื่องแปลงความถี่อย่างมีประสิทธิภาพจึงป้องกันไม่ให้ฝุ่นเข้าไปข้างในเครื่องแปลงความถี่ โดยเฉพาะอย่างยิ่งสำหรับฝุ่นโลหะ
9) กำจัดน้ำมันในพัดลมระบายความร้อนของตัวแปลงความถี่ได้อย่างมีประสิทธิภาพ
บำรุงรักษารายวัน
โปรดทำการตรวจสอบสถานที่ซึ่งยากต่อการตรวจสอบเป็นประจำระหว่างการวิ่ง
รายการตรวจสอบปกติ:
1) ตรวจสอบช่องอากาศและทำความสะอาดอย่างสม่ำเสมอ
2) ตรวจสอบว่าสกรูหลวมหรือไม่
3) ตรวจสอบว่าเครื่องแปลงความถี่ทนทุกข์ทรมานจากการกัดกร่อนหรือไม่
4) ตรวจสอบว่าเทอร์มินัลบล็อกมีร่องรอยส่วนโค้งหรือไม่
5) การทดสอบฉนวนสำหรับวงหลัก
เตือน: เมื่อใช้ megameter (โปรดใช้ DC 500V megameter โปรด) เพื่อวัดความต้านทานของฉนวนสายลูปหลักจะต้องตัดการเชื่อมต่อกับตัวแปลงความถี่ อย่าใช้เครื่องวัดความต้านทานของฉนวนในการวัดฉนวนของวงควบคุม ไม่จำเป็นต้องทำการทดสอบแรงดันสูง (มันเสร็จเรียบร้อยแล้วในการจัดส่ง)
ผู้ติดต่อ: Sales Manager
