
Noker Electric, คู่ค้าของคุณเป็นมืออาชีพไฟฟ้า!


รายละเอียดสินค้า:
การชำระเงิน:
|
| ปิดลูป: | แหล่งจ่ายไฟควบคุมลูปคู่ | โหมดควบคุม: | วิธีการควบคุมหลายวิธี |
|---|---|---|---|
| บำรุงรักษาอย่างรวดเร็ว: | ตำแหน่งความผิดที่ถูกต้องและฟังก์ชั่นการบันทึก | โปรโตคอลการสื่อสาร: | รองรับ MODBUS, PROFIBUS |
| ตำแหน่งผิดพลาดและการบันทึก: | ตำแหน่งความผิดที่ถูกต้องและฟังก์ชั่นการบันทึก | แรงดันไฟฟ้าแสดงอุณหภูมิ: | หน่วยแรงดันไฟฟ้าบัสหน่วยแสดงอุณหภูมิ |
| แสงสูง: | ตัวควบคุมความถี่ตัวแปร,ไดรฟ์อินเวอร์เตอร์ความถี่,ไดรฟ์ความถี่ตัวแปร vfd |
||
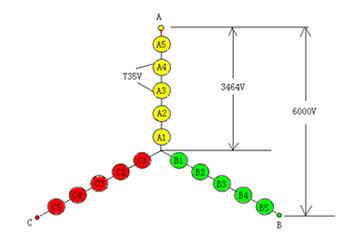
เวกเตอร์ 10KV 1000KW ตัวควบคุมความถี่ที่หลากหลายประสิทธิภาพสูงการควบคุมแบบคู่
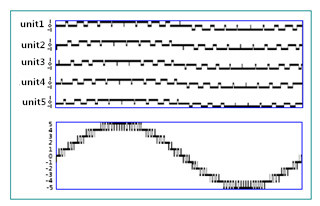
สามเฟส 10KV 1000KW กระรอกกรงแบบไม่ตรงกันและซิงโครนัสมอเตอร์แรงดันไฟฟ้าความถี่สูงอินเวอร์เตอร์ด้วย DSP ความเร็วสูงเป็นแกนควบคุมใช้แรงดันไฟฟ้าเวกเตอร์พื้นที่เทคโนโลยีการควบคุมเทคโนโลยีพลังงานชุดหลายระดับเทคโนโลยีมีความน่าเชื่อถือสูงใช้งานง่ายและประสิทธิภาพสูงตามการออกแบบ เป้าหมายเป็นไปตามการควบคุมความเร็วในการโหลดของผู้ใช้ประหยัดพลังงานช่วยเพิ่มความต้องการของกระบวนการผลิตเป็นตัวแปลงความถี่แหล่งกำเนิดแรงดันสูงถึงสูง นิ้วฮาร์มอนิกของมันน้อยกว่ามาตรฐานแห่งชาติฮาร์มอนิกฮาร์มอนิกของ IEE 519-1992, ปัจจัยกำลังไฟฟ้าอินพุตสูง, คุณภาพของสัญญาณเอาท์พุตที่ดี, ไม่จำเป็นต้องใช้ฟิลเตอร์ฮาร์มอนิกอินพุต, อุปกรณ์ชดเชยตัวประกอบกำลังไฟฟ้า ไม่มีมอเตอร์เหนี่ยวนำฮาร์มอนิความร้อนเพิ่มเติมและแรงบิดกระเพื่อม, เสียง, เอาท์พุท dv / dt, แรงดันไฟฟ้าโหมดทั่วไปและปัญหาอื่น ๆ สามารถใช้มอเตอร์แบบอะซิงโครนัสทั่วไป (หรือซิงโครนัส)
คุณสมบัติ
1. ตำแหน่งความผิดที่ถูกต้องและฟังก์ชั่นการบันทึก
2. หน่วยแรงดันไฟฟ้าบัสฟังก์ชั่นการแสดงอุณหภูมิ
3. แรงดันไฟฟ้า, การดำเนินงาน, บันทึกความถี่สามารถสอบถามได้
4. แหล่งจ่ายไฟควบคุมลูปคู่
5. ขดลวดทุติยภูมิจะถูกใช้เป็นพลังงานสำรองเพื่อควบคุมความปลอดภัยของ
ระบบระหว่างการดำเนินการ
6. วิธีการควบคุมหลายวิธี
7. ทางเลือกของการควบคุมท้องถิ่นการควบคุมกล่องควบคุมระยะไกลการควบคุม DCS
8. สนับสนุน MODBUS, PROFIBUS และโปรโตคอลการสื่อสารอื่น ๆ
9. สามารถตั้งค่าความถี่ได้ทันทีการสื่อสารที่ได้รับ ฯลฯ
10. สนับสนุนการคาดการณ์ความถี่การเร่งความเร็วและฟังก์ชั่นการชะลอตัว
11. ด้วยความหนาแน่นพลังงานสูงก่อนเพื่อน
12. ปริมาณหน่วยขนาดเล็กการออกแบบแบบแยกส่วน
13. เครื่องทั้งหมดมีขนาดกะทัดรัดและใช้พื้นที่น้อย
14. กลไกการป้องกันที่สมบูรณ์แบบ
15. เครื่องประกอบด้วยการป้องกัน 7 ชนิดและเครื่องทั้งหมดยังคงทำงานหลังจากความล้มเหลว
16. เครื่องทั้งหมดรวมถึงการป้องกันการแปลงความถี่และการป้องกันของ
เครื่องยนต์
17. ประสิทธิภาพการควบคุมสูง
18. PID regulator ในตัว;
19. มันสามารถปรับให้เข้ากับเขตข้อมูลที่แตกต่างกันโดยการตั้งค่าพารามิเตอร์และฮาร์โมนิกปัจจุบันเอาท์พุทน้อย
มากกว่า 2% (จัดอันดับ)
หลักการทำงาน


สเปค
| ชิ้น | หน่วย | ข้อมูล |
| แรงดันไฟฟ้าขาเข้า | ความถี่แรงดันไฟฟ้า | สามเฟส, 50Hz, 6kV (10kV) |
| ความผันผวน | แรงดันไฟฟ้า: -10% ~ + 10%, ความถี่: ± 5%, - 10% ~ -35% | |
| คุณสมบัติพื้นฐาน | ความแม่นยำ | การตั้งค่าอนาล็อก: 0.3% ของค่าการตั้งค่าความถี่สูงสุด |
| อย่างมีประสิทธิภาพ | > 98% ในเงื่อนไขการจัดอันดับ | |
| ตัวประกอบกำลัง | > 0.95 | |
| ปัจจัยควบคุม | เวลาของการเร่งความเร็วและการลดความเร็ว | 0.1 ~ 6000.0S สามารถตั้งค่าความเร่งและการเร่งความเร็วแยกกันได้ |
| คุณสมบัติของแรงดันและความถี่ | กำหนดโดยเส้นโค้ง V / F | |
| PID | พารามิเตอร์ของ PID สามารถตั้งค่าได้ด้วยมือ | |
| ฟังก์ชั่นอื่น ๆ | V / F เส้นโค้งการชดเชยความถี่ต่ำจัดอันดับ | |
| วิ่ง | โหมดการทำงาน | การควบคุมเครื่อง, การควบคุมระยะไกล, การควบคุมคอมพิวเตอร์โฮสต์ |
| โหมดการตั้งค่าความถี่ | การตั้งค่าบนหน้าจอสัมผัสการตั้งค่าความเร็วหลายขั้นตอนการตั้งค่าสัญญาณอะนาล็อก (4-20 mA) | |
| หน้าจอสัมผัส | มากกว่าปัจจุบันของมอเตอร์, แรงดันเกินของอินเวอร์เตอร์, ภายใต้แรงดันไฟฟ้าของอินเวอร์เตอร์, มากกว่าปัจจุบันของเซลล์, แรงดันเกินของเซลล์, มากกว่าความร้อนของเซลล์, เฟสขาดของเซลล์, การสื่อสารล้มเหลว | |
| ฟังก์ชั่นการป้องกัน | มากกว่าปัจจุบันของมอเตอร์, แรงดันเกินของอินเวอร์เตอร์, ภายใต้แรงดันไฟฟ้าของอินเวอร์เตอร์, มากกว่าปัจจุบันของเซลล์, แรงดันเกินของเซลล์, มากกว่าความร้อนของเซลล์, เฟสขาดของเซลล์, การสื่อสารล้มเหลว | |
สิ่งแวดล้อม ล้อมรอบ | ล้อมรอบ | ภายในอาคารมีการระบายอากาศที่ดีและปราศจากก๊าซกัดกร่อนและฝุ่นนำไฟฟ้า |
| ระดับความสูง | ต่ำกว่า 1,000m จำเป็นต้องเพิ่มกำลังไฟเมื่อระดับความสูงมากกว่า 1,000 ม | |
| อุณหภูมิ | -20 ~ + 65 ° C | |
| ความชื้น | 90% RH โดยไม่มีการควบแน่นน้ำค้าง | |
| การสั่นสะเทือน | <0.5g | |
| คูลลิ่ง | อากาศเย็นบังคับ |
ใบสมัคร

ผู้ติดต่อ: Sales Manager
